ū„š▀Ż║Vinod CherianŻ¼MathWorks ╝╝ągĀIõNīŻ╝ę
Ų¹▄ćļŖūėŅIė“ā╚š¹║Žų„äė░▓╚½ÖCųŲĄ─┌ģä▌ė·č▌ė·┴ęŻ¼Ų╚╩╣Ų¹▄ćųŲįņÅS╔╠īóĘ└é╚ĘŁ╣”─▄š¹║ŽĄĮé„ĮyŲ¹▄ćĄū▒P┐žųŲŽĄĮyų«ųąŻ¼└²╚ńŻ¼ųŲäėĘ└▒¦╦└ŽĄĮy║═Ā┐ę²┴”┐žųŲŽĄĮy╚ńĮ±Š∙ęčĄ├ĄĮį÷ÅŖŻ¼š¹║Ž┴╦Ę└é╚ĘŁ╣”─▄ĪŻ├└ć°ć°╝ę╣½┬ĘĮ╗═©░▓╚½╣▄└ĒŠųŻ©NHTSAŻ®▀Mę╗▓Į═Ų▀M┴╦▀@ĘN┌ģä▌Ż¼ÅŖųŲę¬Ū¾╦∙ėą 2011 ─Ļ┐ŅŲ¹▄ć║═Ė³ą┬Ą─┐Ņ╩Į▒žĒÜ┼õéõĘ└é╚ĘŁ┐žųŲŲ„ĪŻ▀@ĒŚę¬Ū¾ęį NHTSA ī”ė┌é╚ĘŁ┼÷ū▓Ą─╩┬╣╩öĄō■Ęų╬÷×ķę└ō■ĪŻ└²╚ńŻ¼Ė∙ō■ NHTSA Ą─ć°╝ęĮyėŗ┼cĘų╬÷ųąą─╠ß╣®Ą─öĄō■Ż¼į┌ 2001 ─ĻŻ¼╣▓ėą 10,138 ╚╦╦└ė┌é╚ĘŁ┼÷ū▓╩┬╣╩Ż¼š╝«ö─Ļę“╩┬╣╩╦└═÷┐é╚╦öĄĄ─ 32%ĪŻīŹ╩®ų„äė░▓╚½ÖCųŲ┐╔ĮĄĄ═▄ć▌vé╚ĘŁĄ─’LļUŻ¼Å─Č°£p╔┘Øōį┌é¹═÷ĪŻĮĄĄ═é╚ĘŁ’LļUĄ─ĘĮĘ©ų«ę╗Š═╩ŪīŹ¼FļŖūėĘĆČ©ąį┐žųŲŻ©ESCŻ®Ż¼Ė∙ō■£y┴┐║═ŅAėŗĄ─▄ć▌vĀŅæBüĒæ¬ė├▓ŅäėųŲäėĪŻ▒Š╬─ų„ę¬ĮķĮB╩╣ė├╗∙ė┌─Żą═Ą─įOėŗŻ¼×ķ▀\äėą═ČÓ╣”─▄▄毩SUVŻ®ķ_░l║═ūįäėā×╗» ESCĪŻ
Ų¹▄ć║═┐žųŲŲ„─Żą═
į┌╗∙ė┌─Żą═Ą─įOėŗųąŻ¼║╦ą─Ė┼─Ņ╩Ū┐╔ł╠ąąĄ─ęÄĘČ╗“─Żą═Ż¼╦³├Ķ╩÷┴╦ŽĄĮyĄ─äėæBąą×ķĪŻ┐╔ęį└¹ė├Įø▀^“×ūCĄ─Ų¹▄ć─Żą═Ż©▒Š└²ųą×ķĖ▀▒ŻšµČ╚Ą─ SUV ─Żą═Ż®Ż¼’@ų°ĮĄĄ═┼c┐žųŲŲ„įOėŗŽÓĻPĄ─ķ_░l│╔▒Š║═ĢrķgĪŻ┐╔└¹ė├─Żą═Ą─öĄūųĘ┬šµüĒ蹊┐▄ć▌vī”▓╗═¼▐DŽ“▓┘┐žīŹ“ץ─Ę┤æ¬Ż¼▓óŪę┤╦ŅÉ£yįć┐╔▌pČ°ęū┼eĄžį┌▓╗═¼Ą─┬Ę├µĪó▌å╠źą═╠¢║═▄ć▌vī┘ąįĄ╚ģóöĄŽ┬ųžÅ═ł╠ąąĪŻ┤╦═ŌŻ¼▀Ć┐╔ęįį┌ŪČ╚ļ╩Į┐žųŲŽĄĮyĄ─ķ_░l┼c“×ūCųą╩╣ė├─Żą═ĪŻ
▒Š╬─╦∙ė├Ą─Ų¹▄ć╩ŪĄõą═Ą─ųąą═ SUVĪŻ▄ć▌v─Żą═┐╔į┌ CarSim® ųąšęĄĮŻ¼▀@╩Ūę╗┐Ņ¼F│╔Ą─╔╠śIŲ¹▄ćäėæBĘ┬šµ╣żŠ▀ĪŻ▄ć▌v─Żą═Ą─ąį─▄Ė∙ō■£yįćöĄō■▀Mąą“×ūCŻ¼▀m║ŽĘ┬šµ▄ć▌vį┌ć└ųžé╚āA▀\äėŽ┬Ą─Ę┤æ¬ĪŻ▄ć▌v─Żą═Š▀ėąā╔éƬÜ┴óŪ░Č╦æę╝▄Īóę╗éĆė├ė┌ų¦│ų╗╔▌d┘|┴┐Ą─īŹą─║¾▌SĪŻĘŪŠĆąįöĄīW─Żą═┐╔×ķ╗╔▌d┘|┴┐ĪóĖ„▌SĪóĖ„▌åĪó▐DŽ“ŽĄĮy║═ųŲäėŽĄĮy╠ß╣®ūįė╔Č╚ĪŻ▄ć▌v─Żą═┐╔╩╣ė├▓╗═¼Ą─▄ć▌vģóöĄęį╝░┬Ę├µ║═ŁhŠ│Śl╝■▀MąąūįČ©┴xĪŻ
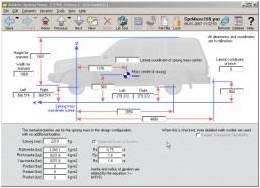
łD 1Ż║╩╣ė├ CarSim ė├æ¶Įń├µįOų├▄ć▌vģóöĄĪŻ
łD 1 ’@╩Š┴╦ CarSim ė├æ¶Įń├µŻ¼ęį╝░ė├ė┌śŗĮ©▄ć▌v─Żą═Ą─▓┐Ęų╬’└Ē▄ć▌vģóöĄĪŻ┐╔Å─┐žųŲŲ„ģóöĄųąĘųäeą▐Ė─▀@ą®ģóöĄŻ¼ęį▒Ń£yįć┐žųŲŲ„į┌▓╗═¼▄ć▌vŚl╝■Ž┬Ą─ąą×ķŻ¼└²╚ńŻ¼ę╗├¹│╦┐═ĪóČÓ├¹│╦┐═║═Ė▀ųžą─Ą─ŪķørĪŻ▒Š╬─╦∙ė├Ą─▄ć▌v─Żą═æ¬ė├Ą─▐DŽ“▌ö╚ļĘ¹║Ž NHTSA fishhook ▓┘┐žīŹ“ׯ¼▀@ĘNś╦£╩īŹ“×ė├ė┌įu╣└äėæB▄ć▌vĘĆČ©ąįĪŻ▒Š£yįćĄ─įOėŗ─┐Ą─╩Ū─ŻöM±{±éåTį┌▒▄ķ_┬Ę├µ╔Ž═╗╚╗│÷¼FĄ─šŽĄK╬’Ģr┐╔─▄▓╔╚ĪĄ─ąąäėĪŻī”ė┌öĄūųĘ┬šµŻ¼╬ęéā×ķ SUV ─Żą═įOČ©▐DŽ“▌ö╚ļŻ¼“×ūC┴╦į┌ø]ėą ESC Ą─ŪķørŽ┬Ż¼▄ć▌vīó│÷¼Fé╚ĘŁĪŻ
┐žųŲŲ„ķ_░l┼cā×╗»
▒Š╬─ųą╦∙īŹ¼FĄ─ ESC ▒▄├Ō┴╦±{±éåTĄ─▓┘ū„ī¦ų┬Ą─▓╗░▓╚½▄ć¾wé╚āA║═é╚╗¼äėū„ĪŻ╦³─▄ī”▄ć▌åæ¬ė├▓ŅäėųŲäėŻ¼Å─Č°š{š¹▄ć¾wé╚āA║═é╚╗¼┬╩Ż¼═¼ĢrūŅąĪ╗»ė╔┐žųŲŲ„ūįäėæ¬ė├Ą─ļŖūėųŲäė╦∙ī¦ų┬Ą─▄ć▌v╦┘Č╚ĮĄĄ═ĪŻ ╬ęéāīŹ¼FĄ─ ESC į┌╚²ĘN┐žųŲ─Ż╩Įų«ķgŪąōQĪŻĖ∙ō■▄ć▌v▀M╚ļ▄ć▌å╗¼ęŲĀŅæBĄ─╚²ĘN┐╔─▄šTę“╝ż╗Ņ┐žųŲ─Ż╩ĮŻ║╩¦╚źĀ┐ę²┴”Īóé╚āA▀^Č╚Īóé╚╗¼▀^Č╚ĪŻ─Ż╩ĮŪąōQ▀ē▌ŗ┐žųŲę╗ĮM▒╚└²-ĘeĘų-╬óĘųŻ©PIDŻ®čaāöŲ„Ż¼╦³éāīóĖ∙ō■ęč£y┴┐║═ŅAėŗĄ─ģóöĄš{š¹±{±éåTī”▄ć▌å╩®╝ėĄ─ųŲäėē║┴”ĪŻSimulink® ųąīŹ¼FĄ─┐žųŲŲ„įOėŗŠ▀ėą┴∙ĒŚ PID į÷굯¼┐╔×ķā×╗» ESC ąį─▄Č°▀MąąĖ³Ė─ĪŻ
į┌┤╦─Żą═ųąŻ¼╬ęéā┐╔ęį▓ķ┐┤▄ć▌å▐D╦┘ĪóųŲäėē║┴”Īó▄ć¾wé╚āAĪóé╚╗¼┬╩║═╗¼ęŲ┬╩ĪŻ─│ą®▄ć▌vĀŅæB╩Ū═©▀^┐╔ė├é„ĖąŲ„öĄō■ŅA£yĄ─Ż¼Š═Ž±į┌īŹļH▄ć▌v┐žųŲŲ„ųąę╗śėŻ¼Č°Ųõ╦¹ę╗ą®ĀŅæB╩Ū═©▀^ęč£y┴┐║═ŅAėŗģóöĄų«ķgĄ─öĄīWĻPŽĄŅA£yĄ─ĪŻ▄ć▌v╦┘Č╚╩Ū═©▀^╬┤ųŲäė▄ć▌åĄ─▄ć▌åŲĮŠ∙▐D╦┘ŅA£yĄ├│÷Ą─ĪŻ╩╣ė├Ą══©×V▓©Ų„üĒ─ŻöMį┌ęč£y┴┐Ą─▄ć▌å▐D╦┘Ž┬▄ć▌væTąįĄ─ą¦╣¹Ż¼▒▄├Ōį┌Ž“╦─éĆ▄ć▌åæ¬ė├ųŲäėē║┴”ĢrŻ¼▄ć╦┘£y┴┐ųĄ│÷¼F▓╗┤_Č©ųĄĪŻ
╚ń╣¹▓╗╩╣ė├įņārĖ▀░║Ą─é„ĖąŲ„Ż¼▄ć¾w╗¼ęŲ┬╩īó╩Ūę╗éĆļyęįų▒Įė£y┴┐Ą─ģóöĄĪŻ╬ęéāīŹ¼FĄ─ ESC īó═©▀^ęč£y┴┐Ą─é╚╗¼┬╩üĒŅA£y▄ć¾w╗¼ęŲ┬╩ĪŻ▄ć¾wé╚āAĮŪ╩Ū═©▀^īóÖMŽ“╝ė╦┘Č╚┼c▄ć¾wé╚āAĮŪŽÓĻP┬ōĄ─é„▀f║»öĄŅA£yĄ─ĪŻį┌▄ć¾wé╚āAĮŪ╠Äė┌ųĖČ©įOėŗŽ▐ųŲā╚ĢrŻ¼▀@éĆé„▀f║»öĄ╩Ūėąą¦Ą─ĪŻ═©▀^┤_▒Żā×╗»╦ŃĘ©īóį┌ŅA£yĄ─▄ć¾wé╚āAĮŪ│¼│÷įOėŗŽ▐ųŲĢrī”┐žųŲŲ„╩®ęįć└Ė±ū„ė├Ż¼╝┤┐╔š╣╩Š│÷Ż¼╬ęéā▓ó▓╗ąĶę¬─▄£╩┤_ŅA£y│¼│÷įOėŗĘČć·Ą─▄ć¾wé╚āAĮŪĄ─ŅA╣└╦ŃĘ©ĪŻę“Č°Ż¼╬ęéā┐╔ęį’@ų°║å╗»Ųš═©▄ć▌v▓┘ū„Śl╝■Ž┬Ą─▄ć¾wé╚āAĮŪŅA╣└╦ŃĘ©ĪŻ
ųĖČ©┴╦┐žųŲŲ„ĮYśŗų«║¾Ż¼Ž┬ę╗ĒŚ╚╬䚊═╩Ūš{ā×┐žųŲŲ„į÷굯¼ęįØMūŃįOėŗąĶŪ¾ĪŻ╚ń╣¹ø]ėą─▄ē“ęįŽĄĮy╗»ĘĮ╩ĮīŹ“ץ──Żą═Ż¼╣ż│╠Ĥ═©│ŻŠ═ę¬ę└┘ćÅ─▀^╚źĄ─▄ć▌v│╠ą“ųą½@Ą├Ą─ų¬ūRŻ¼╗“š▀═Č╚ļ┤¾┴┐Ģrķg╚źćLįćŻ¼═©▀^Ą└┬ĘīŹ“ך{ā× PID čaāöŲ„Ą─ģóöĄųĄĪŻ╗∙ė┌─Żą═Ą─įOėŗ╩╣┤╦▀^│╠ö[├ō┴╦ė▓╝■Ą─┬ķ¤®Ż¼Č°╩Ū╩╣ė├─Żą═üĒ╠Į╦„įOėŗ┐šķgĪŻ═©▀^īó▀@ą®─Żą═┼c╗∙ė┌ūįäėā×╗»Ą─ĘĮĘ©ŽÓĮY║ŽŻ¼╣ż│╠Ĥ╝┤┐╔’@ų°£p╔┘═©▀^įŁą═╗“Ę┬šµķ_š╣Ę▒¼Ź£yįćĄ─ąĶŪ¾Ż¼½@Ą├ūŅāץ─┐žųŲŲ„į÷ęµĪŻ
ī”ė┌▀@ĘNæ¬ė├Ż¼ā×╗»╦ŃĘ©╩ūŽ╚īó┐žųŲŲ„į÷ęµįOų├×ķ┴ŃŻ¼ę¬šęĄĮ▒ŻūCŽĄĮy╠Äė┌įOėŗŽ▐ųŲų«ā╚Ą─ūŅā×┐žųŲŲ„į÷굯¼╣▓ąĶ▀Mąą┤¾╝s 100 ┤╬Ą³┤·Ż¼ėŗ╦ŃĢrķg╝s×ķ 4 ĘųńŖĪŻĄ³┤·╩ĮįćÕeĘ©ätąĶę¬├▄╝»Ą─╚╦╣ż£yįćŻ¼╝┤▒Ń£yįć╩Ū═Ļ╚½┐╔ųžÅ═Ą─Ż¼Č°Ūęš{ā×▀^│╠ųąĄ─é╚ĘŁ▓╗Ģ■ī”▄ć▌vī¦ų┬╚╬║╬ōp║”Ż¼ū÷ŽÓ═¼öĄ┴┐Ą─£yįćė├└²╦∙ąĶĄ─Ģrķgę▓īó│¼▀^ 4 ąĪĢrĪŻį┌¼F┤· PC ╔ŽęįöĄūųĘĮ╩ĮĘ┬šµę╗┤╬×ķĢr 10 ├ļĄ─ NHTSA fishhook ▓┘┐žīŹ“×āHąĶ▓╗ĄĮ 3 ├ļńŖĄ─ĢrķgŻ¼▓óŪę┐╔ęį¤oŽ▐ųŲĄžųžÅ═Ż¼Č°▓╗┤µį┌┼cĄ└┬ĘīŹ“×ėąĻPĄ─ķ_õNĪŻ
į┌┤╦─Żą═ųąŻ¼╬ęéāę¬×ķ ESC ųąĄ─ PID čaāöŲ„īżšęūŅā×┐žųŲŲ„į÷굯¼▒ŻūC▄ć▌vĄ─▄ć¾wé╚ĘŁĮŪĪó╗¼ęŲ┬╩║═╗¼ęŲĮŪ╠Äė┌╠žČ©Ą─įOėŗŽ▐ųŲų«ā╚Ż¼═¼ĢrūŅąĪ╗»ę“▓ŅäėųŲäėę²ŲĄ─╦┘Č╚ōp╩¦ĪŻ┴∙ĒŚ┐╔š{āץ─į÷ęµ╠ß╣®┴╦Į³║§¤oŽ▐ĘN┐žųŲŲ„į÷ęµĮM║ŽŻ¼įö▒M¤o▀zĄ─£yįćÄū║§╩Ū▓╗┐╔─▄īŹ¼FĄ─ĪŻSimulink® Response Optimization™ į╩įSęįłDą╬╗»ĘĮ╩ĮįOų├ŽĄĮyąĶŪ¾Ż¼Ž▐ųŲ▄ć¾wé╚ĘŁ║═▄ć▌v╗¼ęŲŻ¼═¼ĢrūŅąĪ╗» ESC ųŲäėĄ──▄┴┐ōp╩¦ĪŻųĖČ©ąį─▄ś╦£╩ų«║¾Ż¼╗∙ė┌ā×╗»Ą─└²│╠īóūįäėš{š¹ģóöĄŻ¼╩╣▄ć▌v─▄ē“į┌¤oé╚ĘŁĄ─ŪķørŽ┬ł╠ąą fishhook ▓┘┐žīŹ“×ĪŻ
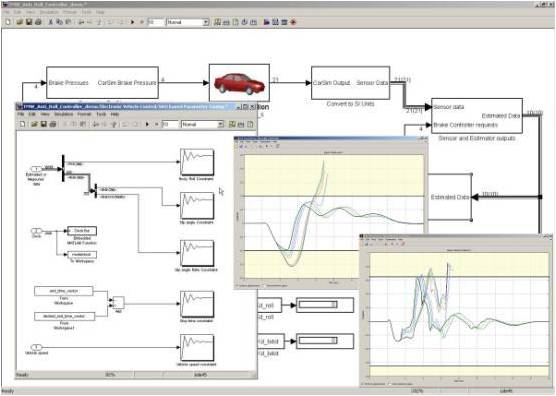
╬ęéāīóąĶꬎ▐ųŲĄ─ą┼╠¢╠ß╣®Įo Signal Constraint ─ŻēKŻ¼▓óęįłDą╬╗»ĘĮ╩ĮįOų├ŲõįOėŗŽ▐ųŲŻ¼╚ńłD 2 Ą─╦«ŲĮīŹŠĆ╦∙╩ŠĪŻ╬ęéā▀xō±┴╦ęįŽ┬ąĶŪ¾Ż©Ž▐ųŲŻ®üĒØMūŃįOėŗ─┐ś╦Ż║
Īż ▄ć¾wé╚ĘŁĮŪŽ▐ųŲ×ķ +/-11.5 Č╚ĪŻ
Īż ▄ć▌v╗¼ęŲĮŪŽ▐ųŲ×ķ +/-11.5 Č╚ĪŻ
Īż ūŅ┤¾╗¼ęŲ┬╩įOų├×ķ +/-37.25 Č╚/├ļĪŻ
Īż Fishhook ▓┘┐žīŹ“×ĮY╩°ĢrĄ─ūŅĄ═▄ć╦┘įOų├×ķ 10 ėó└’/ąĪĢrĪŻ
Īż Ę┬šµĮY╩°Ą─ĢrķgįOų├×ķ 10 ├ļĪŻ
×ķ▒▄├Ōę“ę╗ĮM▓╗š²┤_Ą─┐žųŲŲ„į÷ęµųĄČ°ī¦ų┬Ą─▄ć▌vé╚ĘŁĘ┬šµ╠ßįńĮY╩°Ż¼ąĶę¬ųĖČ©Ę┬šµĢrķgŽ▐ųŲĪŻ
łD 2Ż║╠ß╣®Įo Signal Constraint ─ŻēKĄ─ą┼╠¢Ż©ū¾é╚Ż®ęį╝░ā×╗»▀^│╠ųąé╚ĘŁ┼c╗¼ęŲ┬╩ą┼╠¢Ą─ūā╗»Ż©ėęé╚Ż®ĪŻ³S╔½ģ^ė“┤·▒Ē▓╗į╩įSĄ─ą┼╠¢ųĄĘČć·ĪŻ
├┐ĒŚą┼╠¢Ž▐ųŲČ╝Č©┴x┴╦ą┼╠¢Ą─ĘųČ╬ŠĆąį╔ŽŽ▐║═Ž┬Ž▐ĪŻį┌ā×╗»▀^│╠ųąŻ¼┐žųŲŲ„į÷ęµīó▒╗š{š¹Ż¼Ę┬šµį┌Ą³┤·čŁŁhųąųžÅ═▀\ąąŻ¼ų▒ų┴Ę┬šµą┼╠¢ØMūŃųĖČ©▀ģĮń╗“ā×╗»└²│╠¤oĘ©ĮŌøQå¢Ņ}ĪŻłD 2 ’@╩Š│÷į┌ā×╗»╦ŃĘ©Ą³┤·Ą├ĄĮĮŌøQĘĮ░ĖĄ─▀^│╠ųąé╚ĘŁą┼╠¢║═╗¼ęŲ┬╩ą┼╠¢Ą─ūā╗»ĪŻį┌ĮŌøQ┤╦ŅÉ┐╔ąąąįå¢Ņ}ĢrŻ¼ā×╗»╦ŃĘ©īóėŗ╦Ń▒╗Ž▐ųŲĄ─ą┼╠¢┼cĖ„ĘųČ╬ŠĆąį▀ģĮńų«ķgĄ─ūŅ┤¾ėąĘ¹╠¢ŠÓļxĪŻ═©│ŻŪķørŽ┬Ż¼žōöĄųĄ▒Ē╩ŠŽÓæ¬Ą─Ž▐ųŲęčØMūŃĪŻ
ā×╗»╦ŃĘ©╩╣ė├┼cĖ„▀ģĮńų«ķgĄ─ėąĘ¹╠¢ŠÓļxüĒĖ³ą┬┐žųŲŲ„ģóöĄĪŻį┌śŗįņā×╗»å¢Ņ}ĢrŻ¼ā×╗»╦ŃĘ©╦∙▓╔ė├Ą─ĘĮ╩Į¬Ü┴óė┌ėŗ╦ŃŽĄĮyĀŅæBĄ─öĄųĄĮŌĘ©ĪŻ┐╔ęį╩╣ė├╗∙ė┌╠▌Č╚╗“ĘŪ╗∙ė┌╠▌Č╚Ą─ĘĮĘ©Ż¼└²╚ń▀zé„╦ŃĘ©ĪŻį┌▒Š└²ųąŻ¼ĮoČ©┐žųŲŲ„Ą─ŪąōQ╠žąį║═║¾└mĄ─ĘŪŲĮ╗¼ąą×ķŻ¼╗∙ė┌╠▌Č╚Ą─ĮŌĘ©║▄ļyĄ├│÷╚½ŠųĮŌøQĘĮ░ĖĪŻę“Č°╩╣ė├┴╦─Ż╩Į╦č╦„╦ŃĘ©ĪŻį┌īŹ█`ųąŻ¼╬ęéāĮ©ūhį┌ČÓĘNŅÉą═Ą─ā×╗»ĘĮĘ©ų«ķgŪąōQŻ¼ęį┤_▒Żā×╗»╦ŃĘ©─▄ē“šęĄĮ╚½ŠųśOųĄŻ¼▓ó┼┼│²╩šö┐ĄĮ│╔▒Š║»öĄŠų▓┐ūŅąĪųĄĄ─ŪķørĪŻ
┐žųŲŲ„“×ūC┼cąį─▄“×ūC
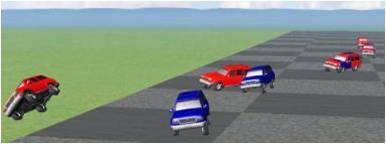
łD 3 ęįą╬Ž¾Ą─ĘĮ╩Įš╣╩Š┴╦ā×╗»║¾Ą─ ESC ▒▄├Ō▄ć▌vé╚ĘŁĄ─ąį─▄ĪŻ╝t╔½Ą─Ų¹▄ć╬┤┼õéõ┐žųŲŲ„Ż¼░l╔·┴╦é╚ĘŁŻ╗Č°╦{╔½Ų¹▄ć┼õéõ┴╦Įø▀^ā×╗»Ą─┐žųŲŲ„ĪŻ═©▀^▀@śėĄ─Ę┬šµŻ¼╬ęéāŠ═─▄šōūC┐╔▒▄├Ō SUV é╚ĘŁĄ─┐žųŲŲ„įOėŗŻ¼Å─Č°śO┤¾Ąž£p╔┘┴╦Ą└┬Ęš{āץ─┤╬öĄŻ¼▒▄├Ō═Ļ╚½ę└┘ćīŹļH▄ć▌v£yįćĪŻ
łD 3Ż║į┌ęį 50 ėó└’/ąĪĢrĄ─Ģr╦┘Ž┬ł╠ąą fishhook ▓┘┐žīŹ“×ĢrŻ¼┼õėą ESC ║═╬┤┼õėą ESC Ą─ SUV Ą─┐╔ęĢ╗»ąą×ķč▌╩ŠĪŻ╦{╔½Ą─ SUV ┼õéõ┴╦Įø▀^ā×╗»Ą─ ESCŻ¼╝t╔½ SUV ╬┤┼õéõ ESCĪŻ
║¾└m▓Į¾E║═ĮY╩°šZ
į┌įOėŗ╣żū„ųąŻ¼║¾└m▓Į¾E═©│Ż╔µ╝░īó┐žųŲ╦ŃĘ©Å─ Simulink ─Żą═▐D×ķį┌Ąū▒P┐žųŲŲ„╔ŽīŹ¼FĄ─┤·┤aĪŻę¬į┌▄ć▌v═Č«aų«Ū░ł╠ąąįOėŗ“×ūCŻ¼┐╔└¹ė├╝»│╔╗»┐ņ╦┘įŁą═įOėŗ║═░ļīŹ╬’Ż©HILŻ®Ę┬šµ╣żŠ▀Ż¼═©▀^┼õėą£y┴┐āx▒ĒĄ─įŁą═Ų¹▄ć▀Mąą┤·┤aĄ─Ą└┬Ę£yįćĪŻ┐╔ęį╩╣ė├╔·«a┤·┤a╔·│╔╣żŠ▀üĒīŹ¼F╦ŃĘ©Ż¼½@Ą├į┌įŁą═Ų¹▄ć╔ŽīŹ¼FĄ─┤·┤aŻ¼▀@ĘNĘĮĘ©─▄ē“ūŅąĪ╗»▐D╗»▀^│╠ųąĄ─Õeš`Ż¼▓ó▀Mę╗▓Į╝ė╦┘▄ć▌vķ_░l▀^│╠ĪŻ┤╦═ŌŻ¼╩╣ė├┤╦─Żą═Ż¼╣ż│╠Ĥ▀Ć┐╔į┌▓╗═¼Ą─▄ć▌v┼õų├Ž┬£yįć┐žųŲŲ„Ż¼ų¦│ų┐ņ╦┘ą▐Ė─Ż¼ūŅ┤¾╗»┐žųŲŲ„įOėŗį┌ČÓĘN▄ć▌v│╠ą“ųąĄ─ųžė├ĪŻ
▒Š╬─ÅŖš{┴╦╗∙ė┌─Żą═Ą─įOėŗį┌ķ_░lĮŌøQé╚ĘŁå¢Ņ}Ą─ ESC ╦ŃĘ©ųąĄ─æ¬ė├Ż¼┤╦═Ō▀Ćš╣╩Š┴╦ę╗ĘNĖ∙ō■įOėŗąĶŪ¾ūįäėš{ā× ESC Ą─ĘĮĘ©ĪŻ